Alpamayo
Alpamayo 1 是一个预训练推理模型,旨在加速自动驾驶(AV)领域的研发。
 1
10元/小时
v1.0
🏔️ Alpamayo 1
镜像简介
连接推理与动作预测,实现可泛化的自动驾驶
镜像使用教程
第一步. 必要准备:HuggingFace 认证
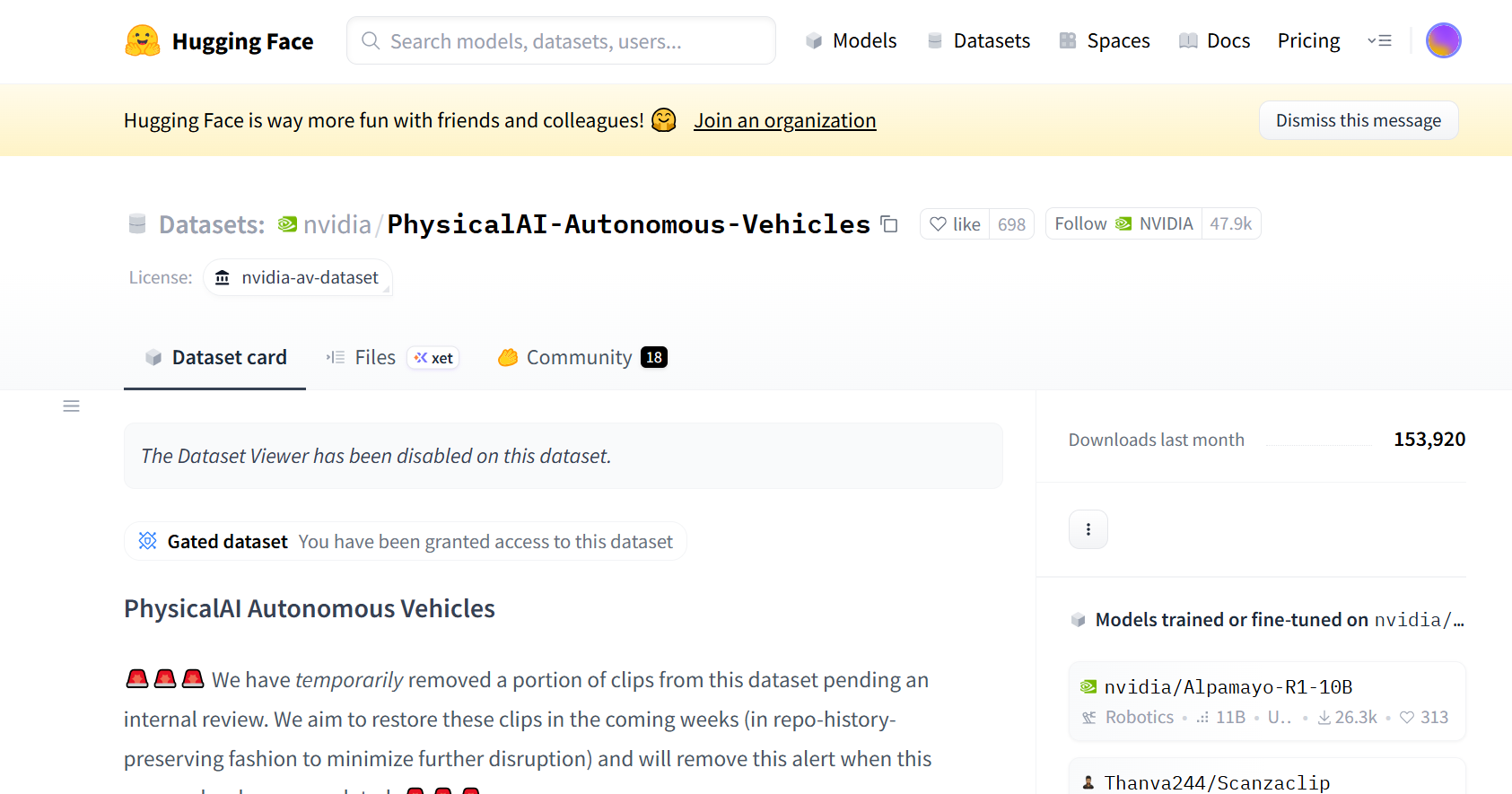
该模型需要访问受限(Gated)资源。请在此处申请访问权限:
点击【登记】

注册账号(注册完毕后需要到您注册的邮箱进行确认!!)

点击【同意协议】
同意协议后的页面
第二步.获取 Token:https://huggingface.co/settings/tokens
你可以在这里获取 Token:https://huggingface.co/settings/tokens
token名称随便填

复制token

第三步. HuggingFace 认证完毕后开始创建实例
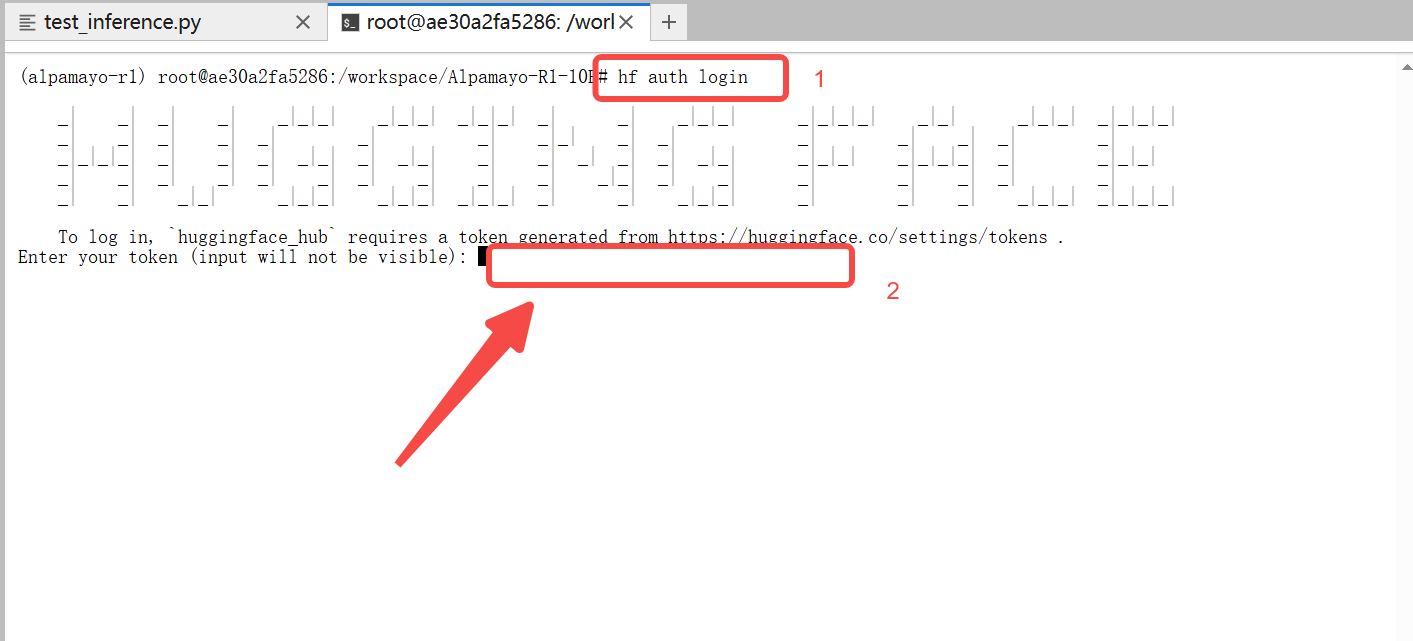
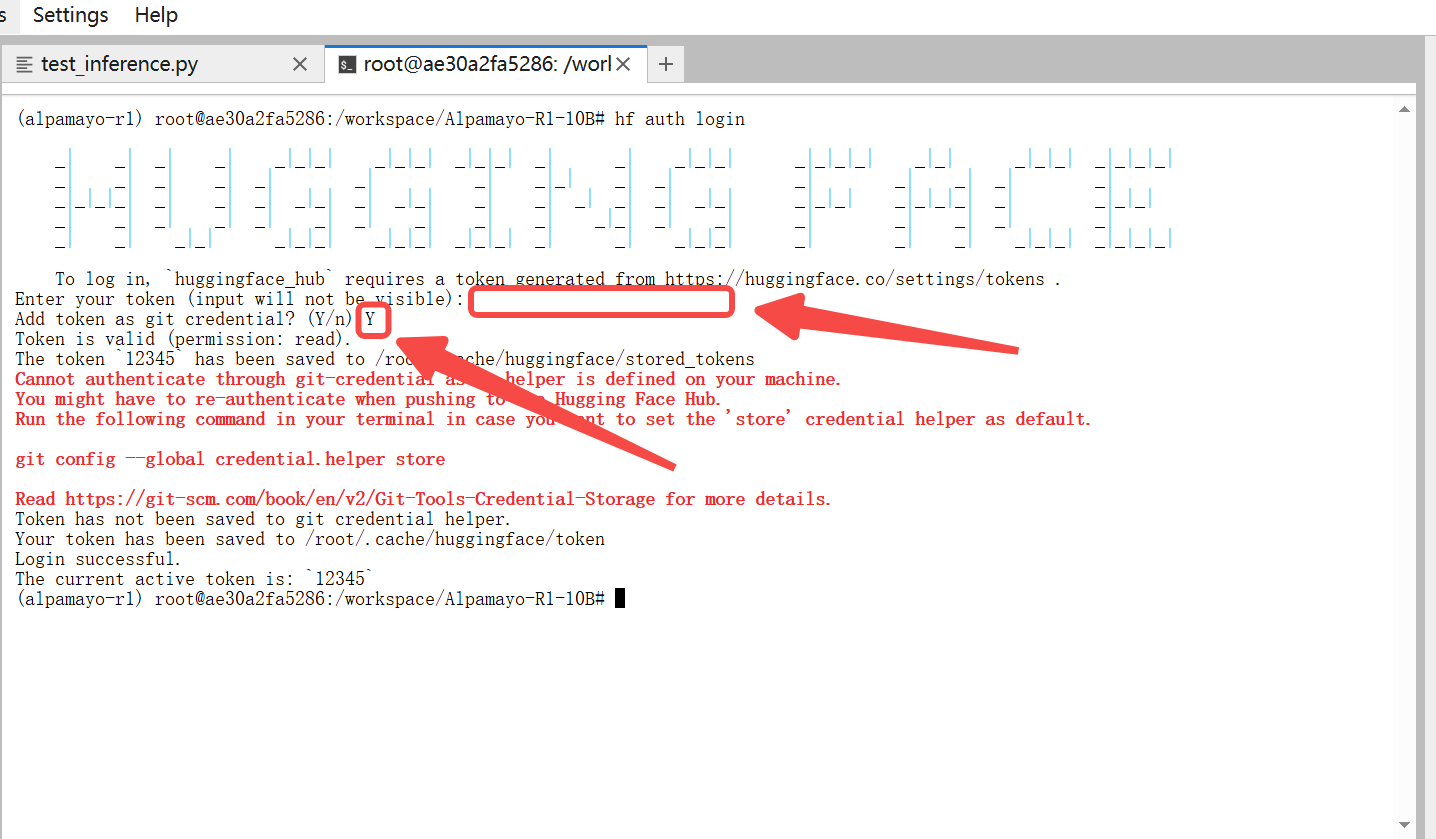
点击【jupyterlab】,进入终端输入下方命令

bash
hf auth login
输入你的HF Token
输入Y
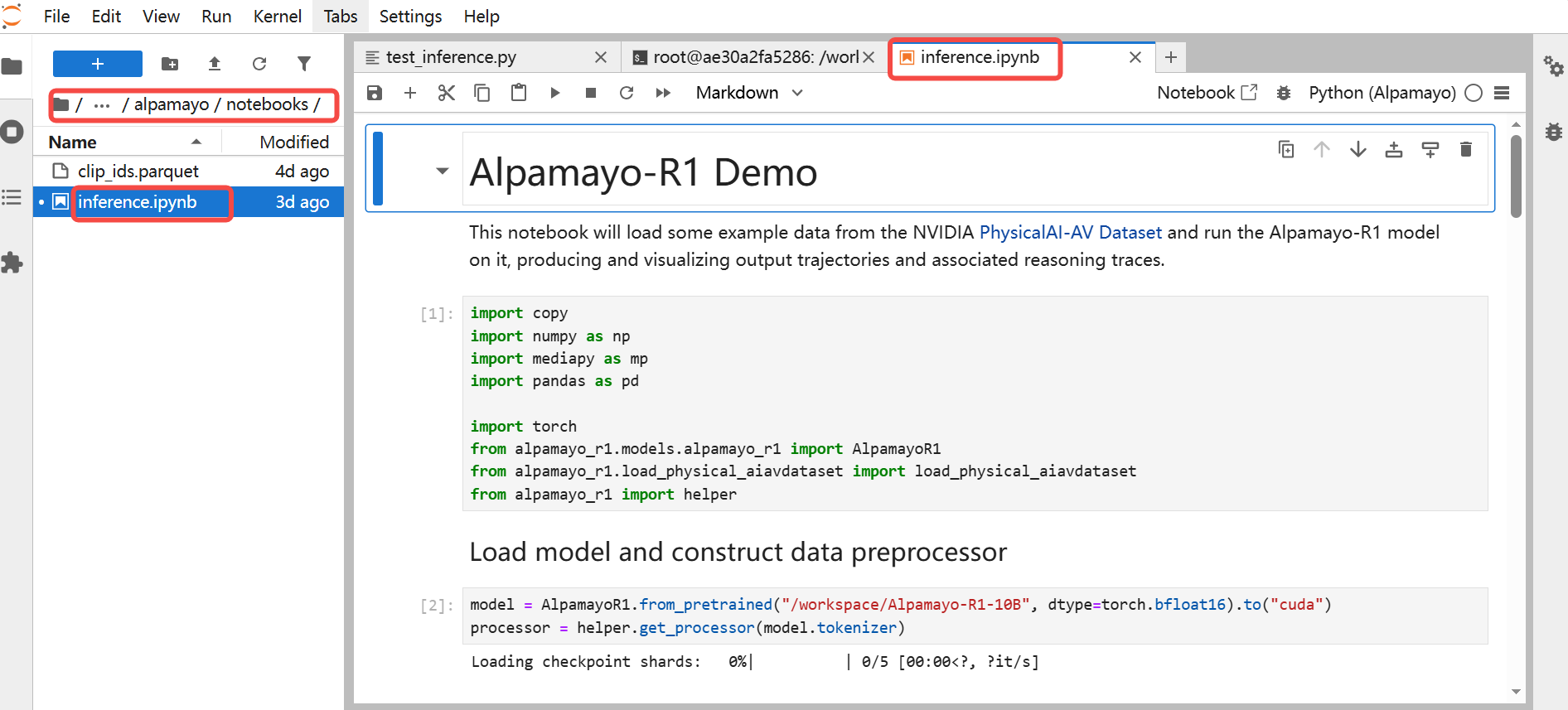
通过路径查看到页面,启动成功,在notebook右上角切换环境,选择 Alpamayo ,如已是 Alpamayo ,那就不切换。
运行推理
注:模型存放位置为/workspace/Alpamayo-R1-10B,本项目下所有的模型路径均改为该位置
测试脚本
注意:此脚本将下载一些示例数据(相对较小)以及模型权重(22 GB)。 取决于你的网络带宽,下载权重可能会比较慢。 作为参考,在 100 MB/s 的有线连接上大约需要 2.5 分钟。
python src/alpamayo_r1/test_inference.py
如果你想获取更多的轨迹样本和推理过程(reasoning traces),请随意修改 num_traj_samples=1 参数(第 60 行)为更大的数值。
交互式笔记本
我们在 notebook/inference.ipynb 中提供了一个具有类似推理代码的 Notebook。
项目结构
alpamayo/
├── notebook/
│ └── inference.ipynb # 示例 Notebook
├── src/
│ └── alpamayo_r1/
│ ├── action_space/
│ │ └── ... # 动作空间定义
│ ├── diffusion/
│ │ └── ... # 扩散模型组件
│ ├── geometry/
│ │ └── ... # 几何工具和模块
│ ├── models/
│ │ ├── ... # 模型组件和工具函数
│ ├── __init__.py # 包标记文件
│ ├── config.py # 模型和实验配置
│ ├── helper.py # 实用辅助函数
│ ├── load_physical_aiavdataset.py # 数据集加载器
│ ├── test_inference.py # 推理测试脚本
├── pyproject.toml # 项目依赖文件
└── uv.lock # 锁定的依赖版本
故障排除
Flash Attention 问题
模型默认使用 Flash Attention 2。如果你遇到兼容性问题:
# 使用 PyTorch 的缩放点积注意力 (SDPA) 代替
config.attn_implementation = "sdpa"
许可证
Apache License 2.0 - 详情请参阅 LICENSE。
免责声明
Alpamayo 1 是一个预训练的推理模型,旨在加速自动驾驶 (AV) 领域的研究与开发。它旨在作为一系列 AV 相关用例的基础——从实例化自动驾驶的端到端骨干网络,到启用基于推理的自动标注工具。简而言之,它应被视为开发定制化 AV 应用程序的构建模块。
重要说明:
- Alpamayo 1 仅供研究、实验和评估使用。
- Alpamayo 1 不是一个完全成熟的自动驾驶系统栈。除去其他限制外,它缺乏对关键真实世界传感器输入的访问,未包含所需的多样化和冗余安全机制,也未经过用于部署的车规级验证。
使用此模型即表示您承认它是一个旨在支持科学探索、基准测试和研究的工具,而不能替代经过认证的自动驾驶系统栈。开发者和贡献者对该模型的使用或其输出不承担任何责任或义务。
@苍耳阿猫 认证作者
认证作者
认证作者
镜像信息
已使用6 次
运行时长
32 H
镜像大小
60GB
最后更新时间
2026-01-20
支持卡型
RTX50系RTX40系48G RTX40系
+3
框架版本
CUDA版本
12.8
应用
JupyterLab: 8888
版本
v1.0
2026-01-20